Willkommen bei den WF-Wolves
Wir sind das RoboCup Team der Ostfalia Hochschule für angewandte Wissenschaften.
Unseren aktuellsten Post findest du hier:
German Open 2024 - Das Finale
Der heutige Tag markierte den Höhepunkt der RoboCup German Open in Kassel für unser Team - das Finale der Humanoid League Kid Size stand auf dem Programm. Doch bevor das Spiel begann, wurden wir mit einer Reihe von technischen Problemen konfrontiert, die uns auf eine harte Probe stellten.
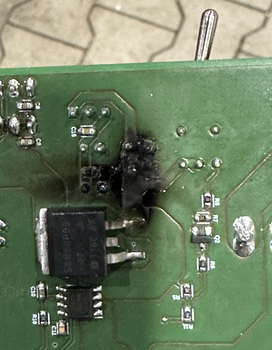
Bereits in den Vorbereitungen stellte sich heraus, dass zwei unserer Roboter ausgefallen waren. Detlef, einer unserer zuverlässigsten Spieler, wurde durch einen unglücklichen Kurzschluss im rechten Schultermotor während eines Tests außer Gefecht gesetzt. Dabei brannte das Powerboard des Roboters durch und zerstörte neben dem Motor auch das Jetson.
Als Ersatz wurde kurz vor dem Spiel das alte Jetson aus Sara verbaut. Dies war jedoch nicht auf dem Stand der anderen Roboter und wies erhebliche Verbindungsprobleme auf. Dieses Fehlverhalten wurde uns leider erst zur Halbzeitpause klar und konnte nie vollständig behoben werden.
Trotz dieser Rückschläge zeigte unser Team eine beeindruckende Einsatzbereitschaft und Entschlossenheit, das Beste aus der Situation zu machen. Unser Hardwareteam arbeitete unermüdlich, um Gambi rechtzeitig für das Finale wieder einsatzbereit zu machen. Deshalb hatten wir zumindest zwei Roboter mit der altbewährten NUC-Jetson-Kombination für das Spiel zur Verfügung.
Sara, ein Vertreter der neuen Generation von Robotern in unserem Team, war mit einer neuen Computerarchitektur ausgestattet, die auf Nvidia Orins basierte. Doch auch sie blieb nicht von den technischen Problemen verschont. Vor dem Spiel wurde ihre Platine durch einen Kurzschluss, ausgelöst durch eine verkeilte Mutter, zerstört und lies sie letztendlich aus dem Tunier ausscheiden.
Somit blieb nur noch Jutta als Vertreterin der neuen Architektur übrig. Doch was für ein Spiel Jutta ablieferte! Die intensiven Monate der Entwicklung und die unzähligen Stunden der Tests zahlten sich aus, als sie im Finale eine herausragende Leistung zeigte. Besonders in der zweiten Halbzeit überzeugte sie mit überragenden Spielleistungen: Sie erzielte unser erstes Tor seit Jahren, verteidigte aktiv gegen die Angriffe der Bit-Bots-Roboter und lieferte sich packende Zweikämpfe.
Die Spannung war greifbar, und die Chancen auf ein weiteres Tor standen gut, als Jutta durch einen Pushing-Verstoß seitens der Bit-Bots-Roboter zu Fall gebracht wurde. Dies führte zu einem Neustart des Orins und beendete den laufenden offensiven Spielzug. Der Schiedsrichter, gestellt von den Bit-Bots, vergab darauf keine Karte sondern nur eine Zeitstrafe für den Hamburger Roboter. Am Ende gewannen die Bit-Bots, welche die ganze Woche über das bessere Team waren, verdient das Finale. Trotz dieser Hindernisse und einer knappen Niederlage gegen die überlegenen Bit-Bots-Roboter war das Spiel ein wichtiger Meilenstein für unser Team.

Für uns war es trotz der Enttäuschungen ein bedeutender Sieg und die Emotionen waren stark. Unsere neue Plattform hat sich bewährt, und die Erfahrungen aus diesem Spiel werden uns dabei helfen, in Zukunft noch stärker zurückzukommen. Das Finalspiel stellte einen Meilenstein in unserer Roboterentwicklung dar. Wir sind auf dem richtigen Weg und werden aus unseren Fehlern lernen um im nächsten Tunier noch besser performen zu können. In Eindhoven werden wir wieder auf die Bit-Bots treffen, dieses mal jedoch mit fünf Robotern der zweiten Generation und nicht einem. Jutta wird ihr Wissen weitergeben.

Unsere Spiele findet ihr übrigens auf unserem Youtube-Kanal: WF Wolves RoboCup Team